MyDetector3D Training and Evaluation¶
Trained Models¶
Waymo Dataset Models (Waymo132/train0to9)¶
These models were trained on the Waymo dataset (Waymo132/train0to9) in HPC2. The model save path is /data/cmpe249-fa22/Mymodels/waymo_models/:
MyVoxelNext:
Config:
mydetector3d/tools/cfgs/waymo_models/myvoxelnext.yamlCheckpoint:
/data/cmpe249-fa22/Mymodels/waymo_models/myvoxelnext/0427b/ckpt/
MyVoxelNext with IoU Branch:
Config:
mydetector3d/tools/cfgs/waymo_models/myvoxelnext_ioubranch.yamlCheckpoint:
/data/cmpe249-fa22/Mymodels/waymo_models/myvoxelnext_ioubranch/0429/ckpt/
MySecond:
Config:
mydetector3d/tools/cfgs/waymo_models/mysecond.yamlCheckpoint:
/data/cmpe249-fa22/Mymodels/waymo_models/mysecond/0429/ckpt/checkpoint_epoch_128.pthEvaluation results:
/data/cmpe249-fa22/Mymodels/eval/waymo_models_mysecond_epoch128
My3DModel:
Config:
mydetector3d/tools/cfgs/waymo_models/my3dmodel.yamlCheckpoint:
/data/cmpe249-fa22/Mymodels/waymo_models/my3dmodel/0507/ckpt/checkpoint_epoch_128.pthEvaluation results:
/data/cmpe249-fa22/Mymodels/eval/waymo_models_my3dmodel_epoch128
Complete Waymo Dataset Models (Waymo132/trainall)¶
These models were trained on the complete Waymo dataset (Waymo132/trainall) in HPC2:
My3DModel (Epoch 256)¶
Config:
mydetector3d/tools/cfgs/waymo_models/my3dmodel.yamlCheckpoint:
/data/cmpe249-fa22/Mymodels/waymo_models/my3dmodel/0508/ckpt/checkpoint_epoch_256.pthTraining: Continued from epochs 129-256 based on checkpoint
/data/cmpe249-fa22/Mymodels/waymo_models/my3dmodel/0507/ckpt/checkpoint_epoch_128.pthEvaluation results:
/data/cmpe249-fa22/Mymodels/eval/waymo_models_my3dmodel_epoch256/txtresults
Performance Results:
Car AP@0.70, 0.70, 0.70:
bbox AP:91.7851, 91.7851, 91.7851
bev AP:68.3034, 68.3034, 68.3034
3d AP:49.0174, 49.0174, 49.0174
aos AP:50.76, 50.76, 50.76
Pedestrian AP@0.50, 0.50, 0.50:
bbox AP:89.7635, 89.7635, 89.7635
bev AP:55.1775, 55.1775, 55.1775
3d AP:50.3953, 50.3953, 50.3953
aos AP:45.93, 45.93, 45.93
Cyclist AP@0.50, 0.50, 0.50:
bbox AP:64.8413, 64.8413, 64.8413
bev AP:51.8248, 51.8248, 51.8248
3d AP:48.8936, 48.8936, 48.8936
aos AP:51.74, 51.74, 51.74
MyVoxelNext (Epoch 128)¶
Config:
mydetector3d/tools/cfgs/waymo_models/myvoxelnext.yamlCheckpoint:
/data/cmpe249-fa22/Mymodels/waymo_models/myvoxelnext/0509/ckpt/checkpoint_epoch_128.pthTraining: Trained from scratch (epoch 0)
Evaluation results:
/data/cmpe249-fa22/Mymodels/eval/waymo_models_myvoxelnext_epoch128/txtresults
Performance Results:
Car AP@0.70, 0.70, 0.70:
bbox AP:96.9390, 96.9390, 96.9390
bev AP:71.0638, 71.0638, 71.0638
3d AP:57.9034, 57.9034, 57.9034
aos AP:57.86, 57.86, 57.86
Pedestrian AP@0.50, 0.50, 0.50:
bbox AP:93.3127, 93.3127, 93.3127
bev AP:67.9591, 67.9591, 67.9591
3d AP:61.6305, 61.6305, 61.6305
aos AP:52.90, 52.90, 52.90
Cyclist AP@0.50, 0.50, 0.50:
bbox AP:80.0512, 80.0512, 80.0512
bev AP:70.7396, 70.7396, 70.7396
3d AP:69.7192, 69.7192, 69.7192
aos AP:67.86, 67.86, 67.86
MySecond (Epoch 256)¶
Config:
mydetector3d/tools/cfgs/waymo_models/mysecond.yamlCheckpoint:
/data/cmpe249-fa22/Mymodels/waymo_models/mysecond/0510/ckpt/checkpoint_epoch_256.pthTraining: Continued from previous
mysecond_epoch_128Evaluation results:
/data/cmpe249-fa22/Mymodels/eval/waymo_models_mysecond_epoch256/txtresults
Performance Results:
Car AP@0.70, 0.70, 0.70:
bbox AP:92.4510, 92.4510, 92.4510
bev AP:67.9950, 67.9950, 67.9950
3d AP:50.5870, 50.5870, 50.5870
aos AP:51.00, 51.00, 51.00
Pedestrian AP@0.50, 0.50, 0.50:
bbox AP:91.2207, 91.2207, 91.2207
bev AP:56.9275, 56.9275, 56.9275
3d AP:49.9933, 49.9933, 49.9933
aos AP:47.57, 47.57, 47.57
Cyclist AP@0.50, 0.50, 0.50:
bbox AP:65.6921, 65.6921, 65.6921
bev AP:52.4134, 52.4134, 52.4134
3d AP:49.4230, 49.4230, 49.4230
aos AP:52.40, 52.40, 52.40
WaymoKitti Dataset Models¶
These models were trained on our converted WaymoKitti dataset in HPC2. The model save path is /data/cmpe249-fa22/Mymodels/waymokitti_models/:
PointPillar:
Config:
mydetector3d/tools/cfgs/waymokitti_models/pointpillar.yamlCheckpoint:
/data/cmpe249-fa22/Mymodels/waymokitti_models/pointpillar/0504/ckpt/checkpoint_epoch_128.pth
Second:
Config:
mydetector3d/tools/cfgs/waymokitti_models/second.yamlCheckpoint:
/data/cmpe249-fa22/Mymodels/waymokitti_models/second/0502/ckpt/checkpoint_epoch_128.pth
VoxelNext 3-Class:
Config:
mydetector3d/tools/cfgs/waymokitti_models/voxelnext_3class.yamlCheckpoint:
/data/cmpe249-fa22/Mymodels/waymokitti_models/voxelnext_3class/0430/ckpt/checkpoint_epoch_72.pth
My3DModel:
Config:
mydetector3d/tools/cfgs/waymokitti_models/my3dmodel.yamlCheckpoint:
/data/cmpe249-fa22/Mymodels/waymokitti_models/my3dmodel/0505/ckpt/latest_model.pth
Model Evaluation¶
Evaluation Results Structure¶
Evaluation results from myevaluatev2.py are stored in /data/cmpe249-fa22/Mymodels/eval/ with the naming convention: datasetname + modelname + epochnumber.
Each evaluation folder (e.g., /data/cmpe249-fa22/Mymodels/eval/waymokitti_dataset_mysecond_epoch128/) contains:
Detection Results (saved by detection function):¶
result.pkl: Detection results in KITTI format (det_annos array) used for evaluationret_dicts.pkl: Detection results, ground truth, and inference time for each frametxtresults: Detection results in KITTI format with 2D bounding boxes converted from 3D bounding boxes{dataset}_{model}_{epoch}_frame_{n}.pkl: Complete frame data with original LiDAR points and ground truth for visualization withvisonebatch.py
Evaluation Results (saved by runevaluation function):¶
result_str.txt: KITTI evaluation resultsresult_dict.pkl: Recall-related evaluation data
Evaluation Process¶
The runevaluation function processes detection results as follows:
Input Processing: Takes
det_annosfrom detection resultsData Extraction: Retrieves info from
dataset.infos, where each annotation dictionary contains:point_cloud,frame_id,metadata,image,annos,posenum_points_of_each_lidar(5 LiDAR sensors)
Ground Truth Processing: The
annoskey containsgt_boxes_lidar(63,9),dimensions,location,heading_angles, etc.Format Conversion: Annotations are converted to
eval_gt_annosusing:
eval_det_annos = copy.deepcopy(det_annos) # contains 'boxes_lidar' (N,7) key
eval_gt_annos = [copy.deepcopy(info['annos']) for info in datainfo] # contains 'gt_boxes_lidar' (N,7) key
transform_annotations_to_kitti_format(eval_det_annos, map_name_to_kitti=map_name_to_kitti)
transform_annotations_to_kitti_format(
eval_gt_annos, map_name_to_kitti=map_name_to_kitti, info_with_fakelidar=False)
result_str, result_dict = kitti_eval.get_official_eval_result(eval_gt_annos, eval_det_annos, class_names)
Visualization Example¶
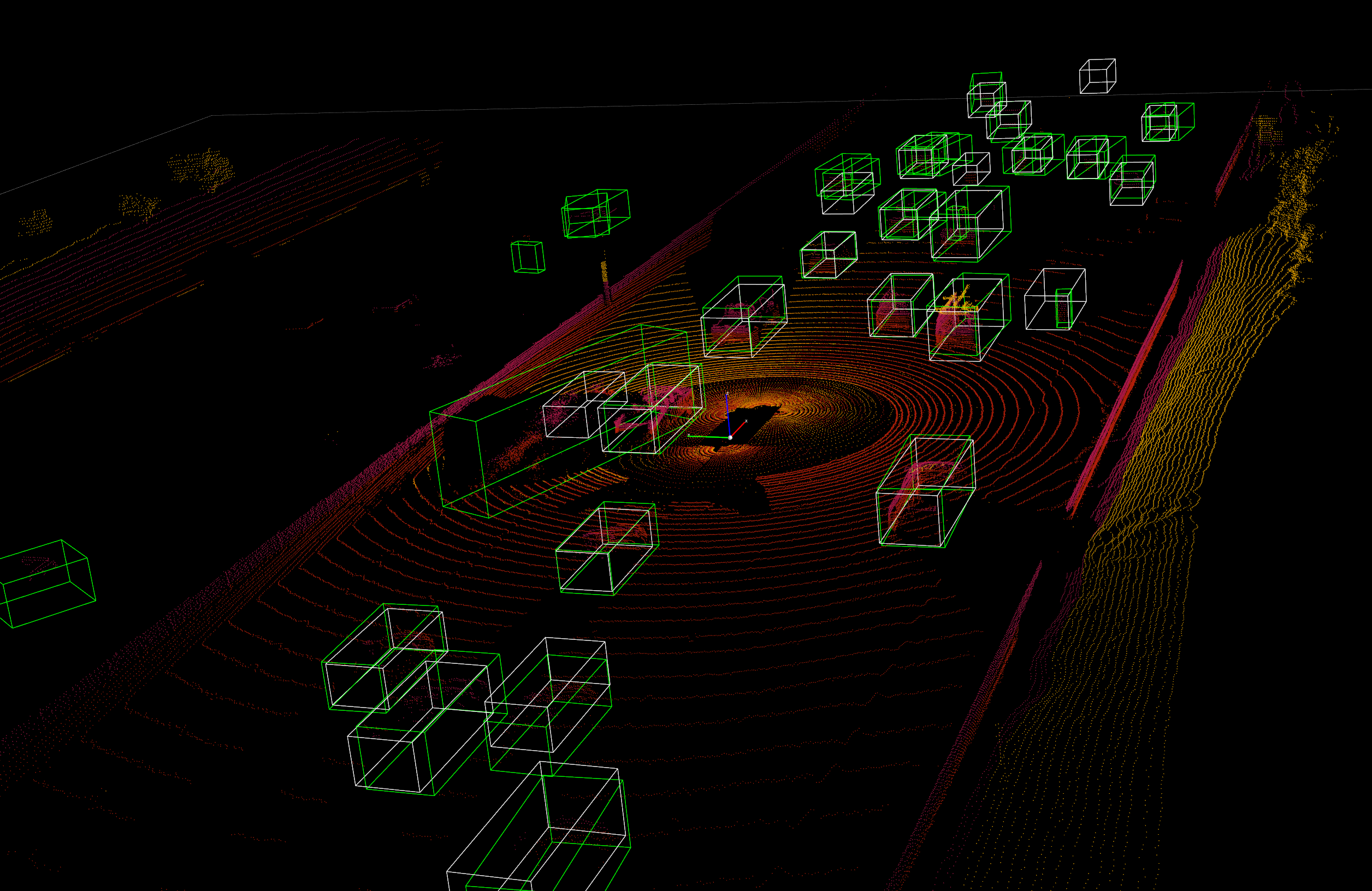 3D detection results using WaymoKitti dataset and SECOND model
3D detection results using WaymoKitti dataset and SECOND model
KITTI Dataset Processing¶
Dataset Info Generation¶
Run create_kitti_infos in mydetector3d/datasets/kitti/kitti_dataset.py to generate:
kitti_infos_train.pklkitti_infos_val.pklkitti_infos_trainval.pklkitti_infos_test.pkl
The process calls dataset.get_infos to generate each info file, processing files in sample_id_list via process_single_scene:
pc_info = {'num_features': 4, 'lidar_idx': sample_idx}
info['point_cloud'] = pc_info
image_info = {'image_idx': sample_idx, 'image_shape': self.get_image_shape(sample_idx)}
info['image'] = image_info
info['calib'] = calib_info
info['annos'] = annotations
Label Processing¶
Labels are extracted using self.get_label(sample_idx), which returns:
return object3d_kitti.get_objects_from_label(label_file)
# |-------[Object3d(line) for line in lines]
# |-----in mydetector3d/utils/object3d_kitti.py
Annotation Structure¶
Annotations are created from the object list, with each dictionary containing:
name: Class name string fromobj.cls_typetruncated: Float (0=non-truncated, 1=truncated)occluded: Integer (0=fully visible, 1,2,3=unknown)alpha: Observation angle (-π to π)Considers vector from camera center to object center
Zero when object is along camera Z-axis (front)
bbox: 2D bounding box fromobj.box2d(left, top, right, bottom in image pixels)dimensions: 3D object size in meters[obj.l, obj.h, obj.w]obj.l: length (label[10])obj.h: height (label[9])obj.w: width (label[8])
location: Object centerobj.loc(label[11-13]) in camera coordinatesrotation_y: Rotation around Y-axis (label[14]) in camera coordinates [-π…π]difficulty: Calculated byget_kitti_obj_levelbased on 2D box height (>40 pixels = Easy)
Coordinate Transformation¶
Annotations are processed to convert from camera coordinates to LiDAR coordinates:
loc_lidar = calib.rect_to_lidar(loc)
l, h, w = dims[:, 0:1], dims[:, 1:2], dims[:, 2:3]
loc_lidar[:, 2] += h[:, 0] / 2
gt_boxes_lidar = np.concatenate([loc_lidar, l, w, h, -(np.pi / 2 + rots[..., np.newaxis])], axis=1)
annotations['gt_boxes_lidar'] = gt_boxes_lidar
The rotation conversion -(π/2 + rots) transforms from KITTI camera rotation (camera x-axis, clockwise positive) to PCDet LiDAR rotation (LiDAR X-axis, clockwise negative).
WaymoKitti Dataset Processing¶
Dataset Location and Structure¶
The WaymoKitti dataset is stored at /data/cmpe249-fa22/WaymoKitti/4c_train5678:
(mycondapy39) [010796032@coe-hpc2 cmpe249-fa22]$ ls /data/cmpe249-fa22/WaymoKitti/4c_train5678/
ImageSets training waymo_gt_database waymo_infos_trainval.pkl
ImageSets2 waymo_dbinfos_train.pkl waymo_infos_train.pkl waymo_infos_val.pkl
Conversion Process¶
The Waymo dataset was converted to KITTI format using Waymo2KittiAsync.py from the WaymoObjectDetection repository:
[DatasetTools]$ python Waymo2KittiAsync.py
[DatasetTools]$ python mycreatewaymoinfo.py --createsplitfile_only
[DatasetTools]$ python mycreatewaymoinfo.py --createinfo_only
Ground truth database generation was performed using mymmdetection3d.
Info File Generation¶
The createinfo_only function calls get_waymo_image_info from myWaymoinfo_utils.py, creating info files with the following KITTI-like format:
{
# [optional] points: [N, 3+] point cloud
# [optional, for kitti] image: {
# image_idx: ...
# image_path: ...
# image_shape: ...
# }
point_cloud: {
num_features: 4, # or 6
velodyne_path: ...
},
# [optional, for kitti] calib: {
# R0_rect: ...
# Tr_velo_to_cam0: ...
# P0: ...
# }
annos: {
location: [num_gt, 3], # array
dimensions: [num_gt, 3], # array
rotation_y: [num_gt], # angle array
name: [num_gt], # ground truth name array
# [optional] difficulty: kitti difficulty
# [optional] group_ids: used for multi-part object
}
}
A new dataset file mydetector3d/datasets/kitti/waymokitti_dataset.py was created based on kitti_dataset.py.
Waymo Dataset Processing¶
Dataset Preparation¶
The mydetector3d/datasets/waymo/waymo_dataset.py file provides different preprocessing functions via the --func parameter:
Available Functions:¶
mycreateImageSet: Creates theImageSetsfolder with train/val split files under/data/cmpe249-fa22/Waymo132/ImageSets/mygeninfo: Creates info files based on provided folder list withprocessed_data_tag='train0to9'mygengtdb: Creates ground truth database viacreate_waymo_gt_databasefunction
Info Generation Process (mygeninfo)¶
Sequence Processing: Calls
waymo_utils.process_single_sequencefor each TFRecord sequence fileInfo Storage: All returned info dictionaries are saved in
train0to9_infos_train.pklunder/data/cmpe249-fa22/Waymo132/Folder Creation: Creates one folder per sequence under
/data/cmpe249-fa22/Waymo132/train0to9Annotation Generation: Includes annotations via
generate_labels
Label Generation (generate_labels)¶
Located in mydetector3d/datasets/waymo/waymo_utils.py:
Source: Uses
waymo frame.laser_labelsfor box annotationsLocation:
loc = [box.center_x, box.center_y, box.center_z]Dimensions:
dimensions.append([box.length, box.width, box.height])(matches OpenPCDet unified coordinates)Additional Fields: Contains
heading_angles,speed_global,accel_global(not in KITTI)Missing Fields: KITTI’s
alphaandrotation_yare not included
Ground Truth Box Calculation:
if annotations['name'].__len__() > 0:
# get speed
gt_boxes_lidar = np.concatenate([
annotations['location'],
annotations['dimensions'],
annotations['heading_angles'][..., np.newaxis],
speed
], axis=1)
else:
gt_boxes_lidar = np.zeros((0, 9))
annotations['gt_boxes_lidar'] = gt_boxes_lidar
Point Cloud Storage: save_lidar_points saves each frame’s LiDAR data as individual .npy files (frame index as filename) under the sequence folder, containing 3D points in vehicle frame.
Ground Truth Database Generation (mygengtdb)¶
The create_waymo_gt_database function:
Dataset Processing: Calls
dataset.create_groundtruth_databasefor ‘train’ splitFile Generation: Creates:
%s_gt_database_%s_sampled_%d_global.npy(stacked_gt_points)%s_waymo_dbinfos_%s_sampled_%d.pkl(array of dbinfo dictionaries)
Database Info Structure: Each dbinfo contains:
db_info = {
'name': names[i],
'path': db_path,
'sequence_name': sequence_name,
'sample_idx': sample_idx,
'gt_idx': i,
'box3d_lidar': gt_boxes[i],
'num_points_in_gt': gt_points.shape[0],
'difficulty': difficulty[i]
}
Folder Creation: Creates
%s_gt_database_%s_sampled_%dfolder under root directory
Complete Dataset Preparation Commands¶
(mycondapy39) [010796032@cs001 waymo]$ python waymo_dataset.py --func 'mycreateImageSet'
Total files: 648
Train size: (518, 1)
Val size: (130, 1)
Done in /data/cmpe249-fa22/Waymo132/ImageSets/trainval.txt
Done in /data/cmpe249-fa22/Waymo132/ImageSets/train.txt
Done in /data/cmpe249-fa22/Waymo132/ImageSets/val.txt
(mycondapy39) [010796032@cs001 waymo]$ python waymo_dataset.py --func 'mygeninfo'
totoal number of files: 648
(mycondapy39) [010796032@cs001 3DDepth]$ python mydetector3d/datasets/waymo/waymo_dataset.py --func 'mygengtdb'
Total samples for Waymo dataset: 6485
---------------Start create groundtruth database for data augmentation---------------
2023-05-08 18:06:49,870 INFO Loading Waymo dataset
2023-05-08 18:07:23,908 INFO Total skipped info 0
2023-05-08 18:07:23,908 INFO Total samples for Waymo dataset: 25867
Database Vehicle: 244715
Database Pedestrian: 231457
Database Cyclist: 11475
---------------Data preparation Done---------------
Dataset Initialization During Training¶
DatasetTemplate Initialization¶
The DatasetTemplate class (in dataset.py) sets up three processors from the DATA_PROCESSOR section of mydetector3d/tools/cfgs/dataset_configs/mywaymo_dataset.yaml:
Point Feature Encoder: Based on
dataset_cfg.POINT_FEATURE_ENCODINGData Augmentor: Based on
dataset_cfg.DATA_AUGMENTORData Processor: Based on
dataset_cfg.DATA_PROCESSOR
Grid and Voxel Configuration:
self.grid_size = self.data_processor.grid_size # [1504, 1504, 40] = POINT_CLOUD_RANGE/voxel_size
self.voxel_size = self.data_processor.voxel_size # [0.1, 0.1, 0.15] meters
WaymoDataset Initialization¶
The WaymoDataset class in mydetector3d/datasets/waymo/waymo_dataset.py reads info files via include_waymo_data:
Data Loading Process: Iterates through sample_sequence_list (all TFRecord files), loads pickle files as infos from each sequence folder, and combines them into the infos[] array.
Data Loading (__getitem__)¶
Point Cloud Loading:
pc_info = info['point_cloud']
sequence_name = pc_info['lidar_sequence']
sample_idx = pc_info['sample_idx']
points = self.get_lidar(sequence_name, sample_idx) # load npy file, limit intensity from -1 to 1
input_dict.update({
'points': points,
'frame_id': info['frame_id'],
})
Annotation Processing:
gt_boxes_lidar = annos['gt_boxes_lidar'] # [N,9]
gt_boxes_lidar = gt_boxes_lidar[:, 0:7] # [54,8] exclude speed information
# FILTER_EMPTY_BOXES_FOR_TRAIN
input_dict.update({
'gt_names': annos['name'], # class string names [54,]
'gt_boxes': gt_boxes_lidar, # [54,7]
'num_points_in_gt': annos.get('num_points_in_gt', None) # [54,]
})
Data Preparation Pipeline:
data_dict = self.prepare_data(data_dict=input_dict) # DatasetTemplate
# 1. data_dict = self.data_augmentor.forward # perform data augmentation
# 2. data_dict['gt_boxes'] = gt_boxes # Filter gt_boxes, convert gt_names to index and add to gt_boxes last column [Ngt,7]->[Ngt,8]
# 3. data_dict = self.point_feature_encoder.forward(data_dict) # feature encoder for points [N,5], add use_lead_xyz=True
# 4. data_dict = self.data_processor.forward # preprocessing: remove out-of-range points, shuffle, convert to voxel
Voxelization Process (transform_points_to_voxels in data_processor.py):
voxel_output = self.voxel_generator.generate(points) # get voxels (64657, 5, 5), coordinates (64657, 3), num_points (64657,)
data_dict['voxels'] = voxels
data_dict['voxel_coords'] = coordinates
data_dict['voxel_num_points'] = num_points
Final Data Dictionary Structure¶
gt_boxes: (16, 16, 8) - batch_size=16, max_boxes=16, box_values=8points: (302730, 5) - 5 features with batch index prepended to 4 point features (xyzr)voxels: (89196, 32, 4) - max_points_per_voxel=32, features=4 (x,y,z,intensity)voxel_coords: (89196, 4) - (batch_index,z,y,x) with batch_index added indataset.collate_batchvoxel_num_points: (89196,) - number of points per voxel
Training Execution¶
(mycondapy39) [010796032@cs001 3DDepth]$ python mydetector3d/tools/mytrain.py
2023-05-08 19:16:49,940 INFO cfg_file mydetector3d/tools/cfgs/waymo_models/my3dmodel.yaml
2023-05-08 19:16:49,940 INFO batch_size 8
2023-05-08 19:16:49,940 INFO epochs 256
2023-05-08 19:16:49,940 INFO workers 4
2023-05-08 19:16:49,940 INFO extra_tag 0508
2023-05-08 19:16:49,940 INFO ckpt /data/cmpe249-fa22/Mymodels/waymo_models/my3dmodel/0507/ckpt/checkpoint_epoch_128.pth
2023-05-08 19:16:49,967 INFO ----------- Create dataloader & network & optimizer -----------
2023-05-08 19:16:53,197 INFO Database filter by min points Vehicle: 244715 => 209266
2023-05-08 19:16:53,222 INFO Database filter by min points Pedestrian: 231457 => 196642
2023-05-08 19:16:53,225 INFO Database filter by min points Cyclist: 11475 => 10211
2023-05-08 19:16:53,248 INFO Database filter by difficulty
num_bev_features features after backbone2d 384